





Attitude (Roll, pitch and heading) provided by fusion of low-level GNSS measurements, and low cost IMU and barometer data through a double differences and tight integration algorithms supporting a multi-receiver approach (up to 4 GNSS receivers/3 baselines).
Thanks to an improved position algorithm.
RTK capabilities integration with no need for a user provided local base station.
GLAD offers improved attitude and position integrity thanks to the smart fusion of GNSS data with IMU and barometer data.

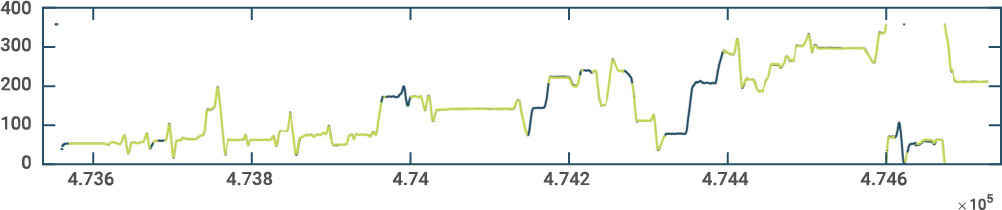

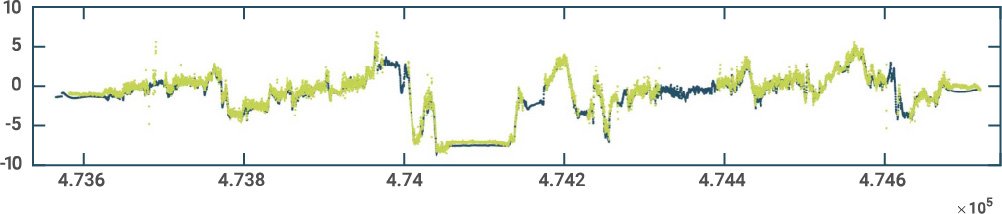

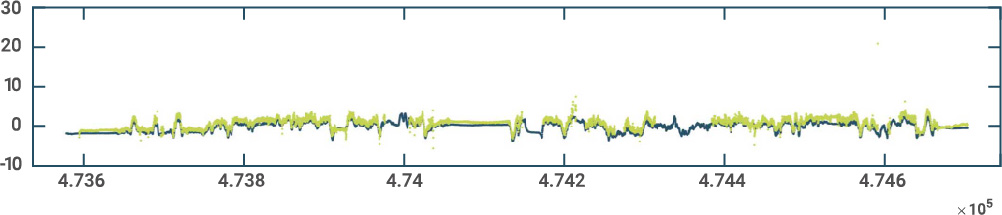
The figure shows for a terrestrial vehicle scenario, the Roll, Pitch and Heading components of the attitude output of GLAD TI system (in blue) versus another commercial system.
The latter system was used as ground reference for attitude accuracy assessment (as it also relies on DDs, but without INS fusion, with longer baselines than the ones used for GLAD system).
It can be verified how GLAD is capable to offer attitude output in important time intervals where the ground reference cannot offer a valid attitude output.
GLAD system offers improved position integrity.
For instance, it offers better accuracy in environment of urban canyon than RTK-based references without INS fusion.
Moreover, the fusion of barometer data enables faster recovery from outage scenarios.
In case RTK is included, no user provided Base Station is required. So, a just “plug and play” RTK solution is possible with GLAD. Only a SIM card and the configuration parameters for accessing a remote CORS are needed.
Solutions of competitors require the inclusion of a user provided base station on land.
Depending on the user application, mechanical limitations or demanded performance, the user may decide the number of antennas in its GLAD product.
Flexible to adapt to different setups.
Contact us for additional customization option depending on specific requirements.
The absence of magnetometers avoids the need for calibration whenever the operation environment is modified.
Moreover, this avoids possible malfunctioning of the system if the magnetic fields is modified from one are to another.
No need for complicated maneuvers (e.g., make turns on the drone) during the initial static auto-calibration.
Only a few parameters must be set after GLAD mechanical integration:
Relative position of antennas and GLAD board.
Selection of profile: terrestrial vehicle, drone or unlimited (manual selection of advanced parameters like filters, course-as-yaw or stationary-yaw-lock).
In case of using RTK: CORS access information and the SIM operator credentials.
Capable to provide high class performance on several key aspects of a navigation system, i.e. attitude & position accuracy, integrity, modularity & flexibility and configuration of use.
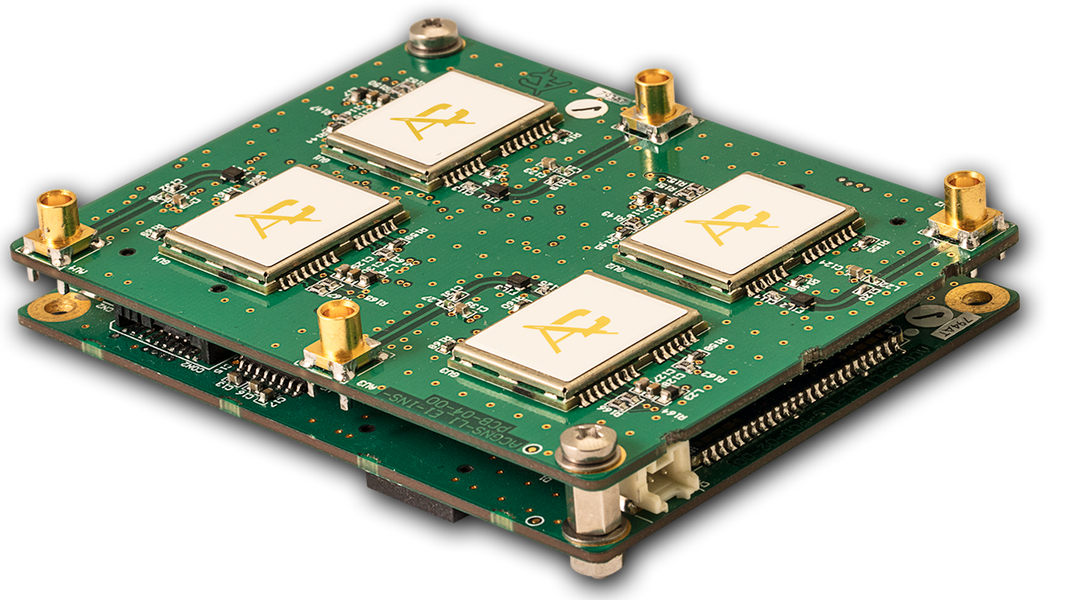

1 GNSS Rx, low cost IMU, barometer and INS.
Tight Integration (TI).
Enhanced with RTK and GPRS modules.
MORE INFO
